English
English Deutsch
Deutsch

Some time ago, the company Eberle Automatische Systeme raised the essential question of whether the real behavior of a cobot, a collaborative robot, can be simulated.
In the context of a resulting master thesis titled “Simulation of Collaborative Robotics”, this research question was explored in detail.
But Just What Exactly Does This Mean?
Well, in reality, for example, the robot collides with an object and its path is changed due to this collision. Or a collaborative robot deliberately moves onto an object up to a certain disruption moment in order to then carry out a subsequent work step. To date, this has been working quite reliably in practice – but can such requirements be simulated as well?
The complete simulation of cobots, meaning the realistic simulation in combination with reactions to unforeseen or deliberate collisions with the surroundings, has so far not been developed by any robot manufacturer.
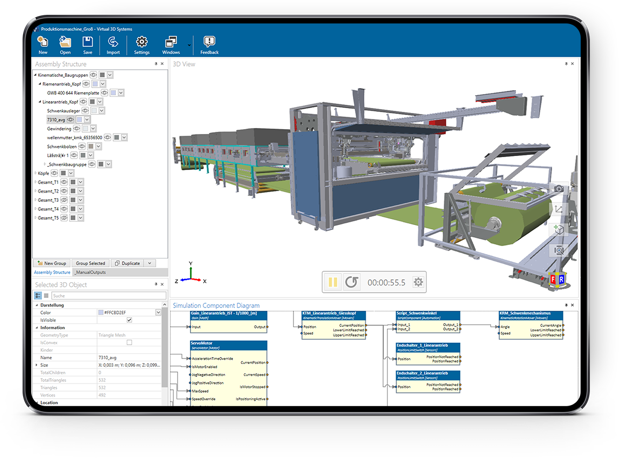
The result of this master thesis shows how robots can be simulated realistically and react dynamically to collisions. The implementation is carried out in combination with the virtual commissioning on a digital twin using the simulation software twin.
Based on tests, it was determined that the Robot Controller Simulation Module (in short RCS Module), a virtual robot controller for realistic simulation, in combination with virtual commissioning, is most suitable.
How Can This Be Implemented?
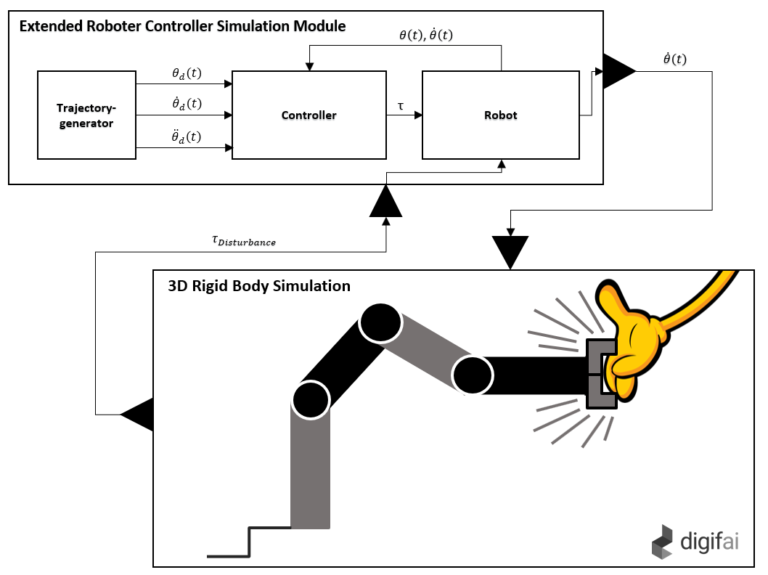
To be able to simulate dynamic collisions and robot interactions, a possibility was developed to calculate disturbance variables occurring during the collision using a solid state simulation. The resulting dynamic behavior of the robot is calculated in the controller during the collision, based on the feedback of disturbance variables (as shown in the illustration).
In order to be able to take into account returned disturbing forces and moments, the universally valid basic dynamic equations according to Newton-Euler were extended. The extension is incorporated into the mathematical description of the robot model.
For verification purposes, a simplified prototype of an RCS module was created, which allows a robot to be controlled in the twin simulation environment and dynamically react to collisions and interactions.
Core and key of this project was the interaction of robot control, solid state and multiphysics simulation using “OpenModelica”.
// Request Demo
Test the twin simulation software now!