Deutsch
Deutsch English
English

Schon vor etlicher Zeit wurde von der Firma Eberle Automatische Systeme die prägnante Frage in den Raum gestellt, ob das reale Verhalten eines Cobots, also eines kollaborativen Roboters, simuliert werden kann.
Im Rahmen einer daraus resultierenden Masterarbeit mit dem Titel „Simulation von kollaborativer Robotik“ ist man dieser Forschungsfrage auf den Grund gegangen.
Aber was kann man sich darunter vorstellen?
Naja, in der Realität beispielsweise kollidiert der Roboter mit einem Gegenstand und die Bahn wird aufgrund der Kollision verändert. Oder ein kollaborativer Roboter verfährt bewusst auf ein Objekt bis zu einem gewissen Störmoment, um anschließend einen weiteren Arbeitsschritt auszuführen. Das funktioniert bis dato in der Praxis recht zuverlässig – aber können solche Anforderungen auch simuliert werden?
Die vollständige Simulation von Cobots, sprich die realistische Simulation in Kombination mit der Reaktion auf unvorhergesehene oder bewusste Kollisionen mit der Umgebung, wurde bis dato von keinem Roboterhersteller realisiert.
Das Ergebnis dieser Masterarbeit zeigt, wie Roboter realistisch simuliert werden und dynamisch auf Kollisionen reagieren können. Die Umsetzung erfolgt in Kombinationen mit der virtuellen Inbetriebnahme am digitalen Zwilling mit Hilfe der Simulationssoftware twin.
Anhand von Untersuchungen wurde festgestellt, dass das Robot Controller Simulation Module (kurz RCS Modul), eine virtuelle Robotersteuerung zur realistischen Simulation, in Kombination mit der virtuellen Inbetriebnahme, am besten geeignet ist.
Wie kann das realisiert werden?
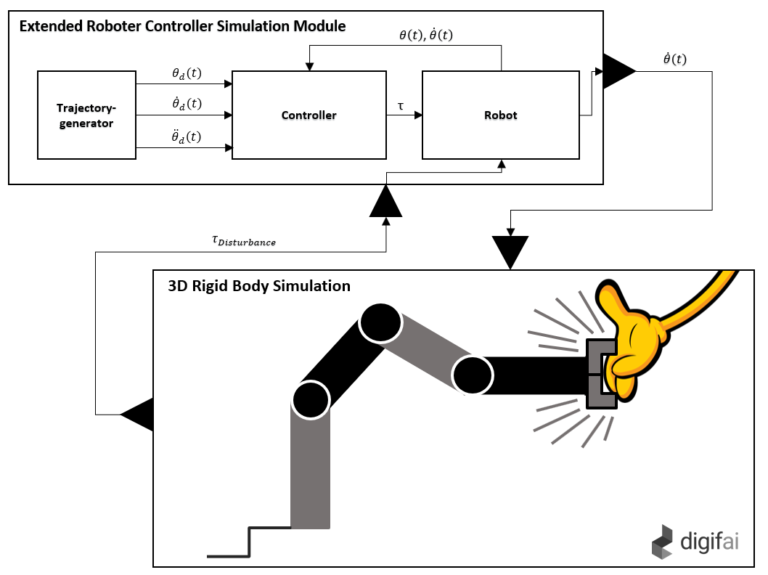
Um dynamische Kollisionen und Roboterinteraktionen simulieren zu können wurde einerseits eine Möglichkeit entwickelt, auftretende Störgrößen während der Kollision, mit Hilfe einer Festkörpersimulation, zu berechnen. Das resultierende, dynamische Verhalten des Roboters wird bei der Kollision, anhand der Rückführung von Störgrößen (wie in der Grafik veranschaulicht), in der Steuerung berechnet.
Um rückgeführte Störkräfte und -momente berücksichtigen zu können, wurden die allgemein, gültigen dynamischen Grundgleichungen nach Newton-Euler erweitert. Die Erweiterung fließt in die mathematische Beschreibung des Robotermodells.
Zur Verifizierung wurde ein vereinfachter Prototyp eines RCS-Moduls erstellt, mit Hilfe dessen ein Roboter in der Simulationsumgebung twin gesteuert und dynamisch auf Kollisionen und Interaktionen reagieren kann.
Kernpunkt und Schlüssel dieser Arbeit war das Zusammenspiel von Robotersteuerung, Festkörper- und Multiphysiksimulation mittels „OpenModelica“.
// Demo anrfagen
Testen Sie die Simulationssoftware twin jetzt!